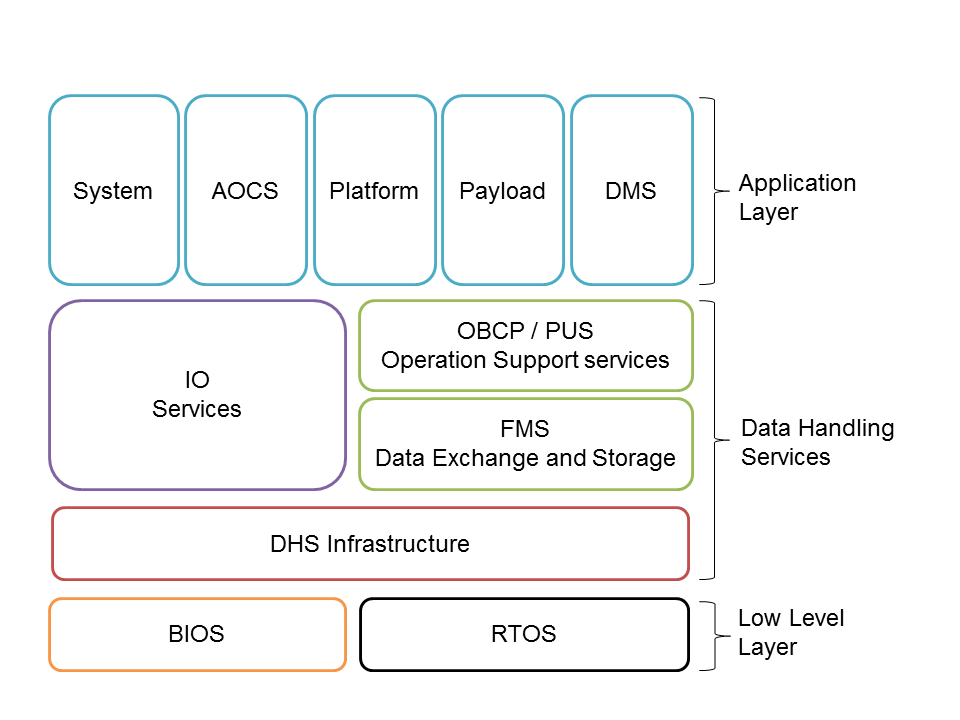
State of the art data management and control in Satellite systems, depicted in Figure 1, is currently implemented on single processors with three levels software architecture: the Low Level Layer including a Board I/O System (BIOS) and real-time operating system (RTOS), a Data Handling Service Layer and an Application Layer. Applications running on the satellite central computer are typically the Attitude and Orbit Control system (AOCS), the housekeeping and management functions at satellite, platform and payload levels and the Data Management System. Failure Detection Isolation and Recovery mechanisms are also included in these applications. The global criticity level is homogeneous.
Figure 1 - Typical Satellite Central Software
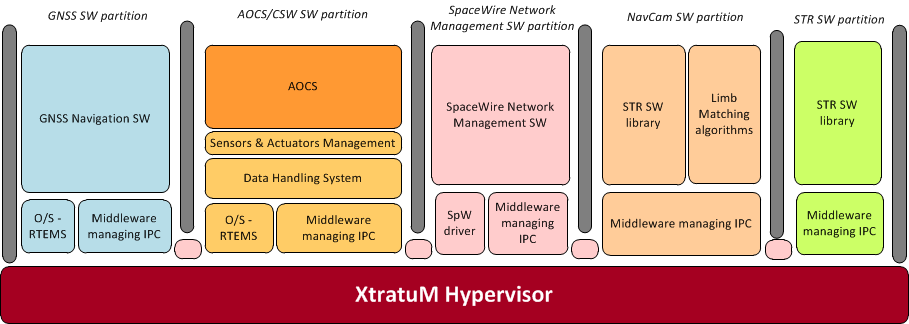
With the increase of processing power and the push for reducing costs, weight, volume and power consumption, integrated and modular architectures have been introduced, inspired from the IMA implemented in Aircraft and AUTOSAR in Automotive domain, and powered by partitioned execution platform based on hypervisors. This enables the processing on a single computer of the Central software functions together with the more demanding data processing previously allocated to GNSS receivers and Star-trackers and previously implemented in separate additional computing devices. This led to the “very integrated avionics” as implemented in the ESA study “Prototyping a SpaceWire AOCS” illustrated by the Figure 2 below. This kind of architecture is today implemented in large constellation and could be also proposed for the next generation of Copernicus spacecraft provided more processing power becomes available in radiation hardened multicores.
Figure 2 - Very Integrated Central Software on the PSA study
In future systems, with more CPU performance available on board and more use of mainstream standards from other industrial and commercial domains, this approach could be taken for “new space” type of applications allowing use of commercial of the shelf parts (COTS), generally taken from the automotive or aeronautical domains. With such devices, the processing power becomes enough so as to take into account all required computing functions on a single device for many types of spacecraft, meaning including also the payload processing. Current high performance devices providing ARM multicores or future RISC V platforms are potentially carrying such opportunity. However, on such platform, the mixed criticality as well as the necessary dependability assurance shall be ensured. For the SELENE project, the satellite use case aims at highlighting and demonstrating a number of objective and benefits such as:
Minimizing cost, weight, volume and power through electronics integration
Considerably simplify the payload data management design by the use of a common standard and generic execution platform with e.g. Linux available on-board
Simplify S/W system integration thanks to incremental application validation
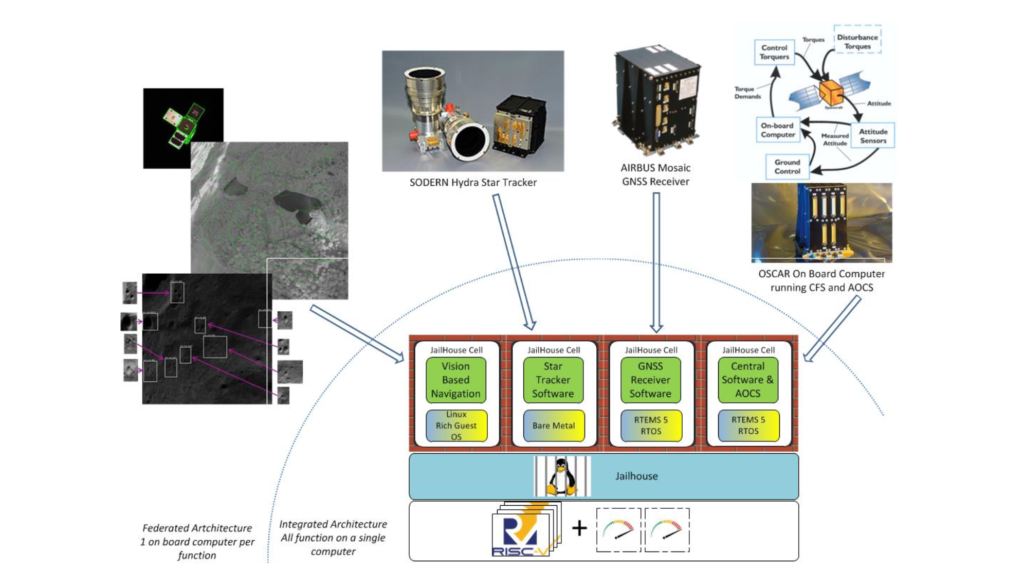
Enable high criticality functions (e.g. manned flight, in-orbit rendez-vous, autonomous robotics operations, planetary landing) to share resources with less critical functions such as payload or vision base navigation image processing (illustrated in Figure 3).
Figure 3- Very High Performance SELENE integrated Software Architecture
This website uses cookies to improve your experience. If you continue, we'll assume that you are happy to receive all cookies on the SELENE project website. ACCEPT
Privacy & Cookies Policy
Privacy Overview
This website uses cookies to improve your experience while you navigate through the website. Out of these cookies, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may have an effect on your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. This category only includes cookies that ensures basic functionalities and security features of the website. These cookies do not store any personal information.
Any cookies that may not be particularly necessary for the website to function and is used specifically to collect user personal data via analytics, ads, other embedded contents are termed as non-necessary cookies. It is mandatory to procure user consent prior to running these cookies on your website.